2004. június 16. 17:38, Szerda
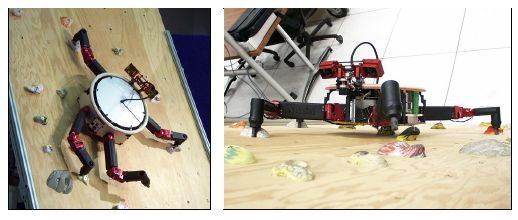
A Lemurnak nevezett pókszerű robot már minden külső irányítás nélkül képes követni egy emberi mászót egyenetlen felületen, emellett pedig kísértetiesen emberi a testtartása.
Megtette első lépéseit az a robot hegymászó, ami egy nap a Mars szirtjeire mászhat, vagy akár a földrengések áldozatainak is segítséget nyújthat. A Lemurnak nevezett pókszerű robotot - ami egy teljesen önműködő sziklamászó prototípus - a Stanford Egyetem és a NASA Sugárhajtómű Laboratóriumának (JPL) mérnökei közösen fejlesztették ki Kaliforniában. A JPL ma a marsjáróiról a legismertebb, melyek január óta kutatják a vörös bolygót, azonban
Tim Bertl, a projekt vezető mérnöke, a Stanford robot laboratóriumának munkatársa szerint a Lemur technikája újabb szintre emelheti a bolygókutatást.
"A tudósok nagyon szeretnének olyan robotokat látni a Marson, amelyek képesek megmászni a meredek sziklákat, miközben geológiájukat tanulmányozzák" - mondta Bertl, aki úgy véli a mászó robotoknak a Földön is jó hasznát vehetnénk a keresési és mentési munkálatokban. "Sokakat foglalkoztat a robotok bevonása a katasztrófák helyszínein" - tette hozzá Gurvinder Virk, a brit
Leeds Egyetem robot szakértője.
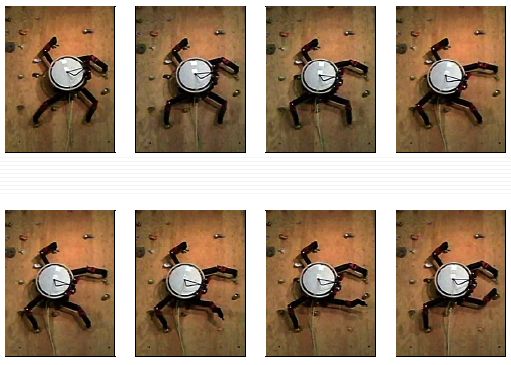
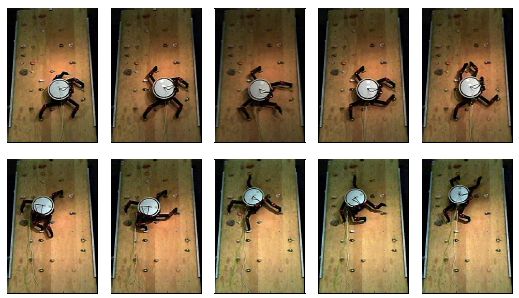
A jelenlegi mászó robotokat úgy tervezték meg, hogy tapadókorongok vagy mágnesek alkalmazásával lapos szerkezeteken haladjanak, azonban az egyenetlen geológiai felületek jóval nagyobb kihívást jelentenek. Egy központi testtel és négy, hármas csatlakozási ponttal ellátott végtaggal a Lemur járásmódja egy emberi hegymászóéra emlékeztet. Jelenleg a robot még nem képes függőleges falak megmászására, azonban az egyenetlen felületeken karmaival egészen kis kapaszkodókon is képes megvetni a lábát. "Olyan mintha egy ember a mászáshoz csupán egyetlen ujját használná" - mondta Bertl.
Pillanatnyilag a Lemur nem látja a kapaszkodókat, ezért mielőtt megkezdené a mászást, be kell táplálni a robot fedélzeti számítógépébe a fal számítógépes modelljét, ami tartalmazza a kapaszkodók koordinátáit. A robot az adatokból kiszámítja az ideális utat és kidolgozza, hogyan manőverezze magát minden egyes lépésnél. A Lemur projekt végcélja, hogy maga tudja felmérni a helyszínt valamint a kiszámított utat, és kameráitól és érzékelőitől kapott adatok alapján menetközben képes legyen módosítani azt. Pillanatnyilag az érzékelőket csak arra használja, hogy meggyőződjön a kapaszkodó biztonságosságáról.
Miután a Lemur egyik végtagját egy új kapaszkodóra rakta, ezzel egyidejűleg a súlypontját is át kell helyeznie a másik három végtag újrapozícionálásával, hogy megtartsa egyensúlyát. Ehhez összetett számításokra van szükség. Az útvonal tervező szoftvert kifejezetten a különböző végtag beállítások gyors elemzésének feladatához tervezték, hogy minél előbb megtalálja a leghatékonyabb elhelyezkedést a következő lépéshez. Ennek kidolgozása most még akár néhány percet is igénybe vehet, azonban az irányító rendszer áttervezése állítólag ezt jelentősen fel fogja gyorsítani.
A Lemur eljövendő reinkarnációit valószínűleg még biztosabb fogódzókkal látják majd el, tagolt lábain több csatlakozási pont lesz, valamint arra is meg fogják tanítani hogyan reagáljon, ha váratlanul kicsúszna alóla a talaj.
Letölthető videók:
Videó #1
Videó #2
Videó #3