2005. február 21. 11:50, Hétfő
Először mutatkozott be az a robot trió, ami képes emberi testtartással járni. A gépek egy egyedülálló rendszert alkalmaznak, ami minden eddigi két lábon járó robotnál hatékonyabbá teszi őket, a járáshoz nincs több energiára szükségük, mint egy embernek.
Az olyan robotok, mint a Honda
Asimója körülbelül tízszer annyi energiát használ fel a közlekedéshez, mint egy ember, mivel az összes lábízületét motorok hajtják. Az új robotok azonban egy úgynevezett passzív dinamikai rendszerrel vannak ellátva, lehetővé téve a robot lábszárainak visszalendülését a helyére, így a gravitáció használatával ösztönössé válik a járás. A robotokat az amerikai
Cornell Egyetem, a Michigan Egyetem, az
MIT, valamint a holland
Delft Egyetem kutatói építették meg.
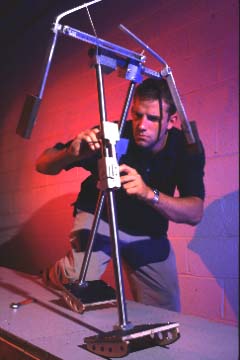

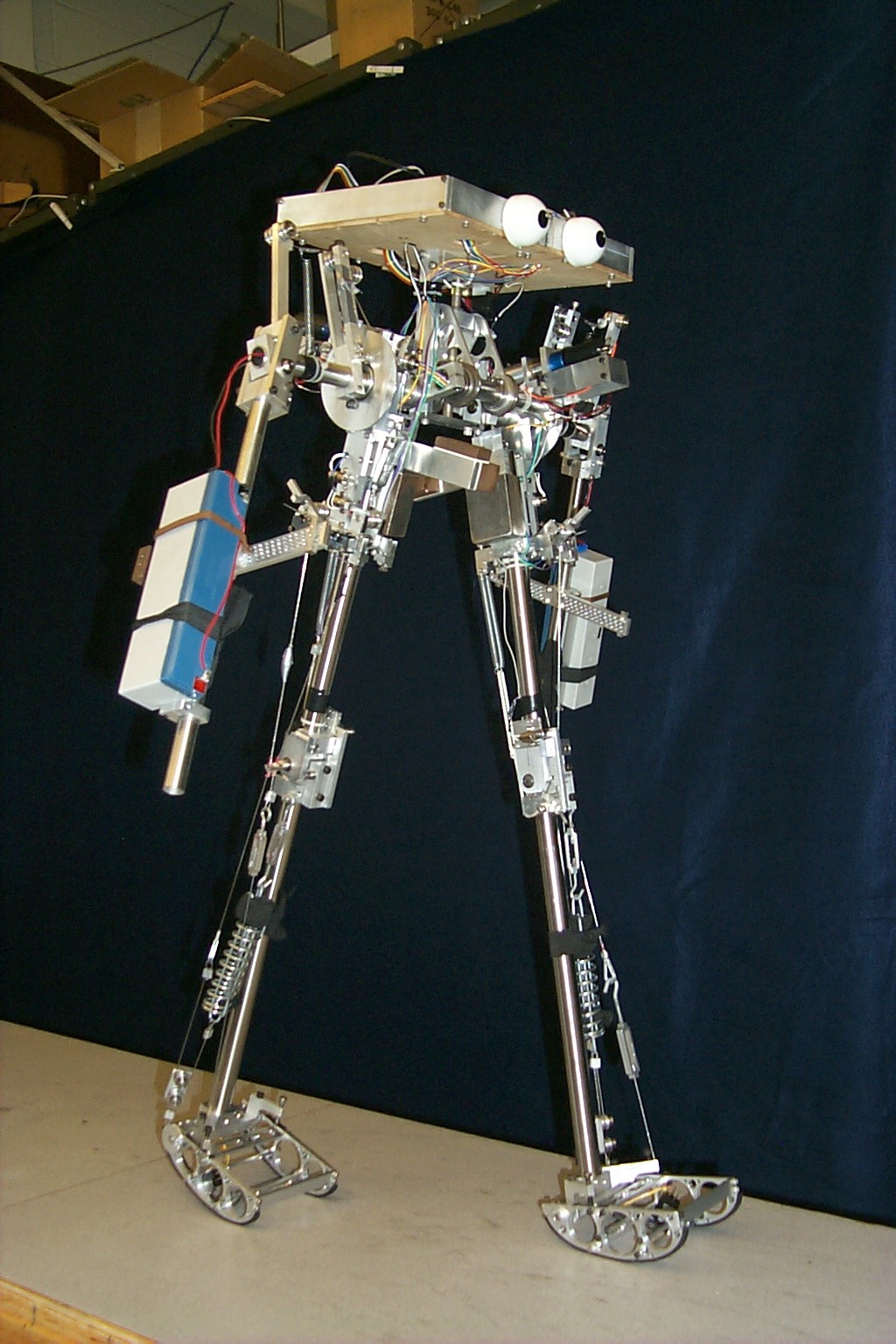
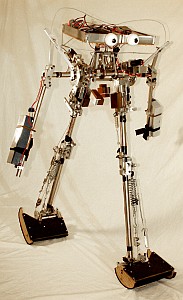
Steven Collins a robot társaságában
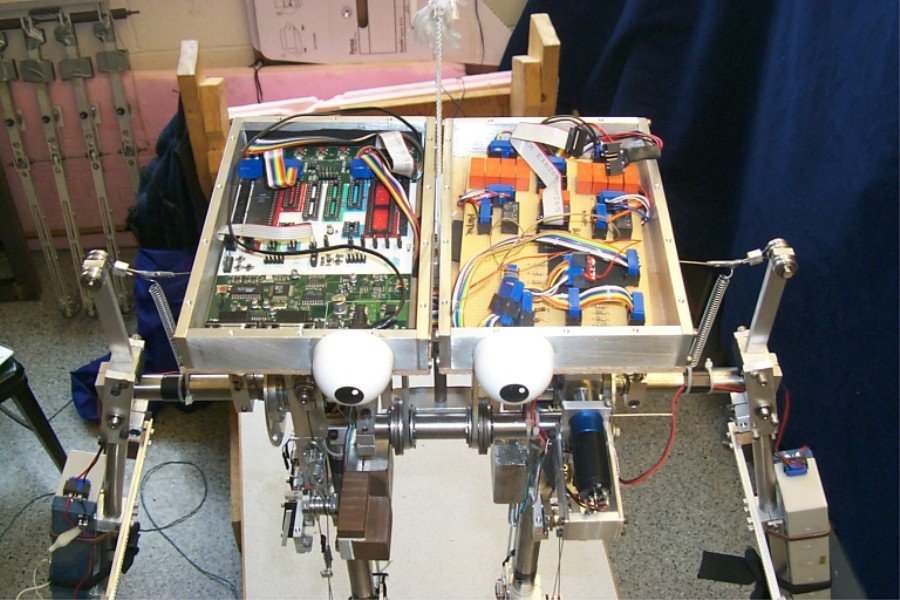
"Ezek az első olyan energiaforrással is ellátott robotok, melyek a passzív dinamikát alkalmazzák" - mondta Steven Collins, aki a Science legfrissebb számában publikálta kutatási értekezését. A kissé esetlenül lépkedő, de talán pont ezért szimpatikus droidokat a múlt hét végén gyakorlatban is bemutatták az Amerikai Tudományos Előrelépések Szövetségének (AAAS) éves találkozóján. Az energiahatékonyság a mozgás gépesítésének kisebb mértékében rejtőzik, magyarázta Andy Ruina, a Cornell gépészmérnöke. "Ha nem jól tervezzük meg, akkor a motorok elszívják az energiát" - mondta. "Az energiaelnyelés csökkentése érdekében a motorokra eső munkát a lehető legjobban redukálni kell."
A fentiek érdekében Riuna és munkatársai egy repülési mérnök, Ted McGeer, a miniatűr robot repülőszerkezeteket tervező Insitu Group alapítójának munkáját fejlesztették tovább. McGeer úttörő szerepet játszott a passzív dinamikájú lépegetők tanulmányozásában, melyek kizárólag a gravitáció által hajtva végig mennek egy lejtős kifutópályán. A kutatók nagyjából azt a módszert alkalmazták, mint anno a Wright testvérek, akik első repülésükhöz aprólékosan tanulmányozták a vitorlázórepülést, majd a megfigyelések alapján elkészült szerkezetüket ellátták egy motorral. Ruina és kutatótársai ezeket a lejtőn közlekedő robotokat vesézte ki, majd a gravitáció mellé kis motorokat társítva elérte, hogy sík felületeken is képes legyen haladni teremtménye.
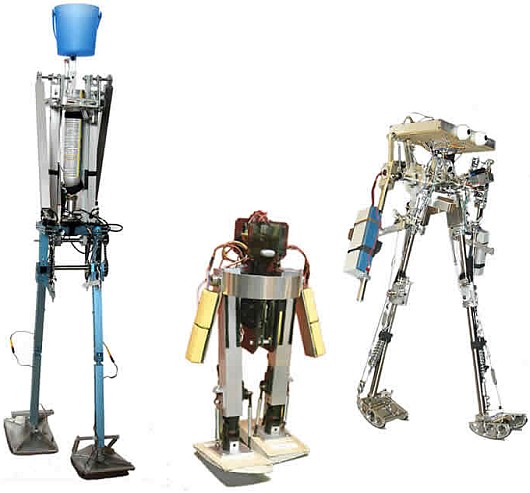
A Cornell robotja közel 13 kilogramm súlyú, lábai megközelítőleg egy méter hosszúak, míg az MIT gépe, amit Toddlerre kereszteltek (toddler: járni tanuló kisgyerek), mindössze 2,74 kilogramm súlyú és csupán 43 centi magas. A hollandok szerkezete 8 kilójával és másfél méteres magasságával a kettő közé helyezhető. Az MIT robotja az első járó gép, amit egy tanulási algoritmussal is elláttak, lehetővé téve számára a változó terephez való alkalmazkodást, így ez a típus nevezhető a leginnovatívabbnak. "A közeljövőben olyan robotokkal fogunk találkozni, melyek képesek lesznek olyan terepen is közlekedni, amin robot még soha nem jutott át" - mondta Russ Tedrake, a Toddler főtervezője.

Klikk a képekre a nagyobb változathoz
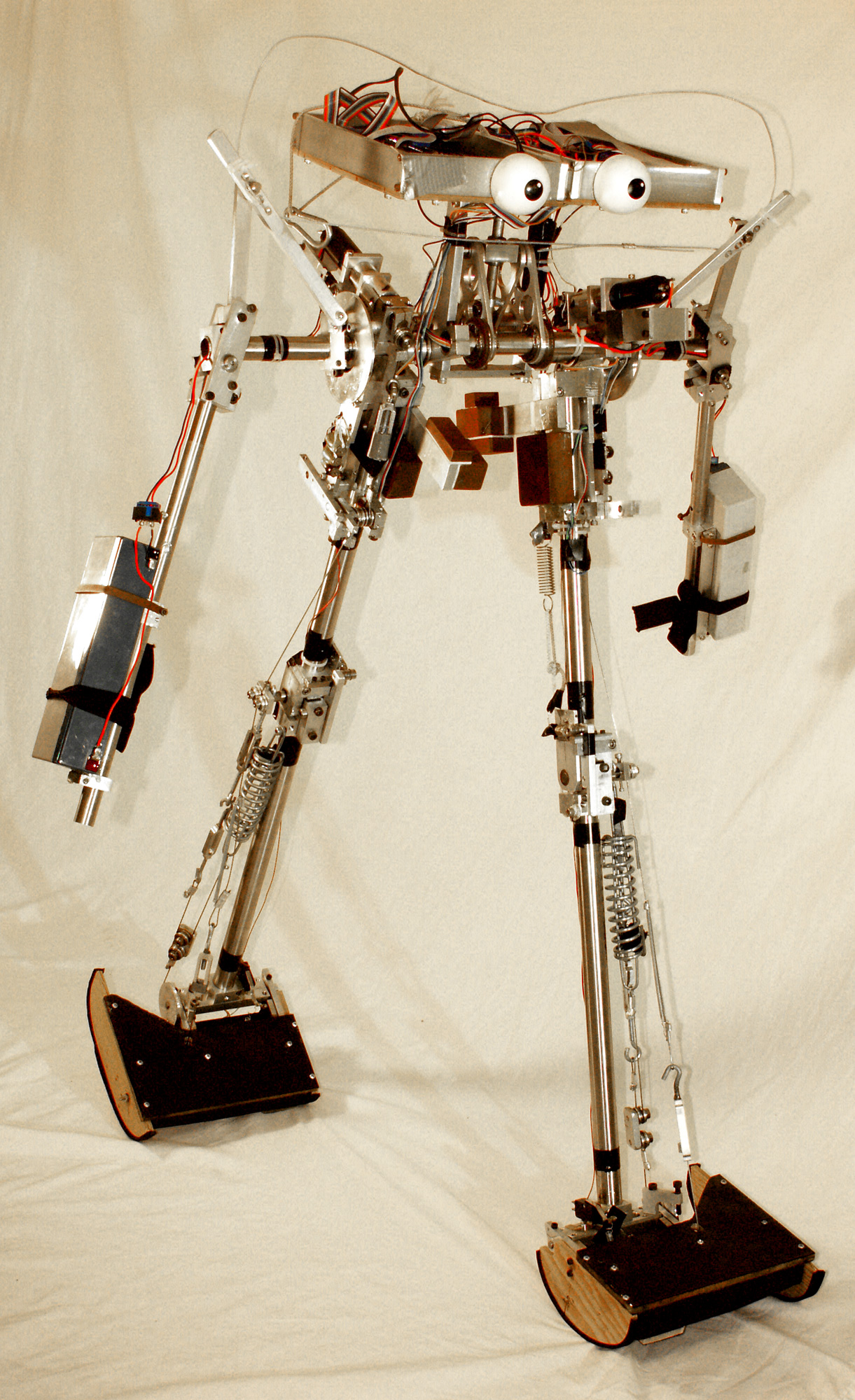
A lépegető stabil, emberszerű mozdulatai azt sugallják, hogy a passzív dinamikai hatások rendkívül fontosak az emberi járás természetes mechanikájában is. Ruina úgy véli, ezek a robotok betekintést fognak nyújtani többek közt az állatok mozgásába és a láb elhelyezkedésének és egyensúlyának biomechanikájába, valamint a gépek segíthetnek olyan, járást segítő protézisek megtervezésében, melyek alkalmazása kevesebb erőfeszítést igényel.
Klikk a képekre a nagyobb változathoz
Ruina hangsúlyozta, hogy a Cornell és a Delft robotjai csupán előre tudnak közlekedni, ezért ez a hasznos lépegető gépek kifejlesztésének csupán az első lépcsőfoka. "Hosszú utat kell még bejárnunk, hogy megtartsuk ezeknek a robotoknak a hatékonyságát, miközben fokozzuk sokoldalúságukat" - mondta Ruina. "Izgalmas idők következnek a robottechnikában" - tette hozzá Tedrake.
Letölthető videók
A robot lépegetés közben, mérete 8 MB, formátuma .mov
Steven Collins magyarázata, mérete 12 MB, formátuma .mov