2005. április 6. 12:01, Szerda
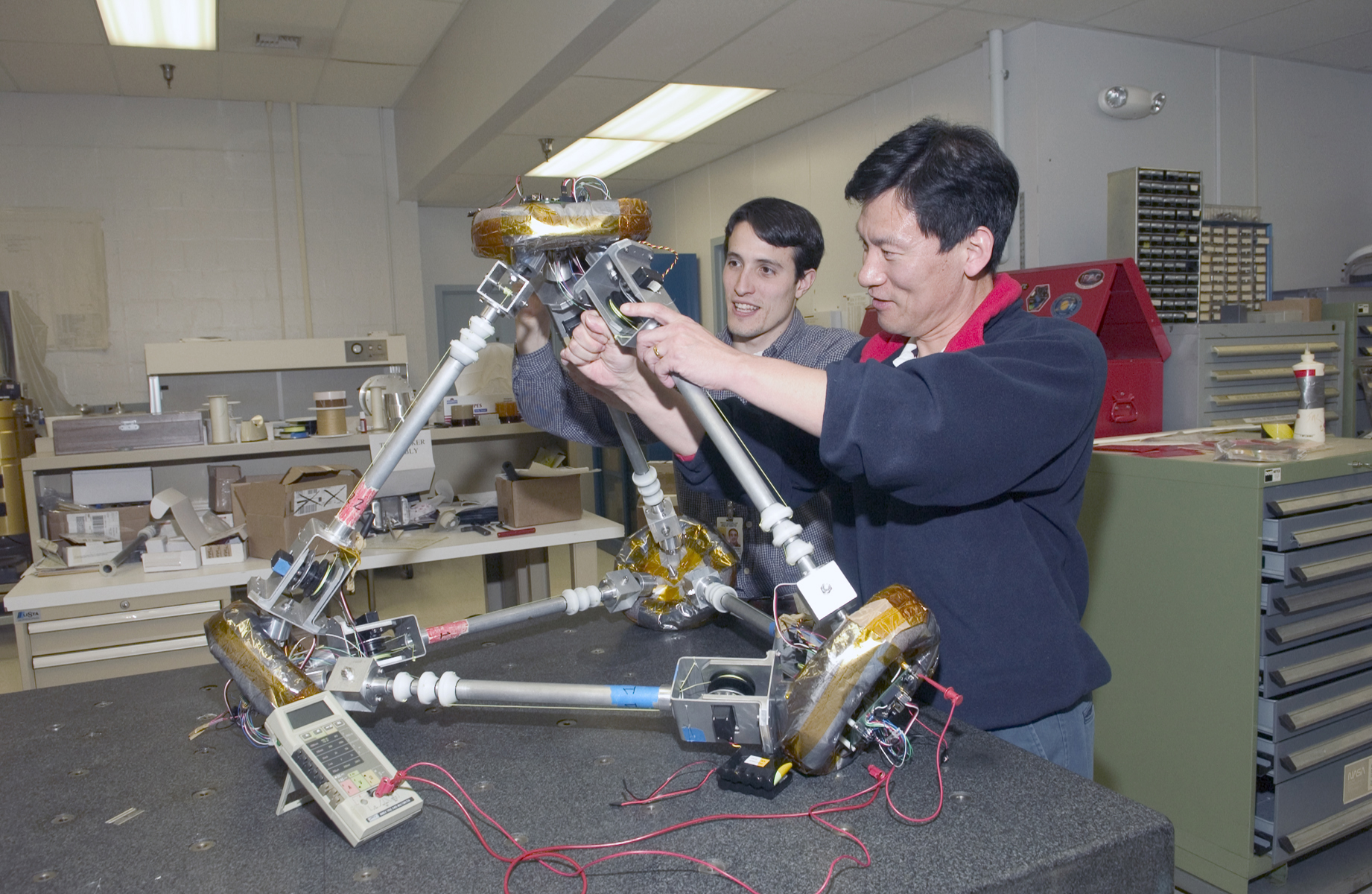
Mint az aggódó szülők, úgy nézték a NASA mérnökei gyermekük első lépéseit. A TETWalker robot sikeresen szelte át a Goddard Űrrepülő Központ egyik helyiségét.
A robot kicsinyített másai alkotják majd az úgynevezett ANTS, azaz autonóm nanotechnológiai rajokat. Ezek a neves lengyel író, Stanislaw Lem 1964-ben megírt, magyarul
A legyőzhetetlen címre fordított regényében szereplő módon összekapcsolódva, alakjuk változtatásával képesek lesznek különböző terepakadályok leküzdésére, vagy olyan hasznos szerkezetekké alakulni, mint egy kommunikációs antenna vagy egy napvitorla.
"Ez a prototípus az első lépés egy forradalmi robottípus kifejlesztése felé, aminek számtatlan előnyöe van a jelenlegi elgondolásokkal szemben" - mondta Steven Curtis, az
ANTS projekt, a Goddard és a Langley Kutató Központ közös tervezetének főfelügyelője. A Langley fejlett animációs eszközeivel működési szituációkat dolgoz ki az ANTS projekt számára.
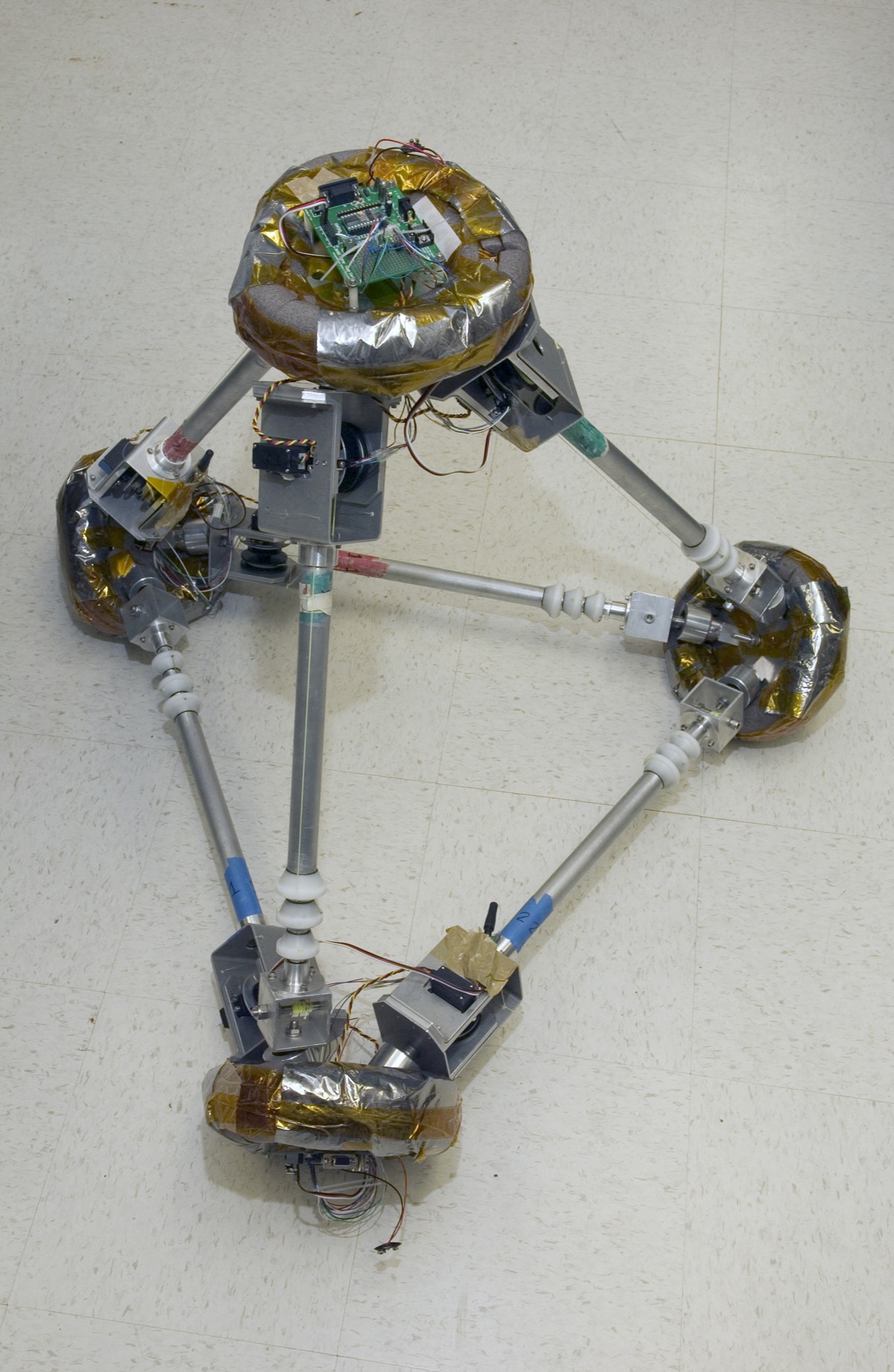
A TETWalker elnevezés a tetraéderes járkálóból adódik, mivel egy négy egyenlő oldalú háromszögből álló tetraéderre hasonlít. A prototípusban elektromos motorok helyezkednek el a tetraéder sarkainál, a csomópontokban. A csomópontok a tetraéder éleit alkotó merevítőkhöz kapcsolódnak. A merevítők egymásba csúsznak, akár egy kameraállvány lábai, a motorok ezeket nyújtják ki és húzzák össze. Az élek hosszának változtatásával megváltozik a tetraéder súlypontja is, ami végül átbillen, így mozog a rendszer. A csomópontok forognak, igen nagy rugalmasságot adnak a robotnak.
Klikk a képre a nagyobb változathoz
2005 januárjában a prototípust elszállították az antarktiszi McMurdo állomásra, hogy a Marson uralkodó zord időjárásnak megfelelő körülmények között teszteljék. A teszteredmények szerint néhány módosítással növelhető a teljesítmény, például a motorok a csomópontok helyett a merevítők középre helyezése leegyszerűsíti a csomópontok kialakítását és növeli megbízhatóságukat.
A csapat becslései szerint a TETWalkerek sokkal kisebbé varázsolhatók amennyiben a motorokat mikro- és nano-elektomechanikus rendszerekre cserélik. A merevítők fémszalaggal vagy szén nanocsövekkel való kiváltása jelentősen növelné az egy rakétába bezsúfolható robotok számát, mivel ezek teljesen összehúzhatók, azaz a piramis összezsugorítható arra a pontra, ahol a csomópontok összeérnek.
A rajokba rendezett miniatűr TETWalkerek hatalmas előnyöket vonultatnak fel a jelenlegi rendszerekkel szemben. A raj rendkívül rugalmas, alakváltásaival egymástól egészen eltérő jellegű feladatok elvégzésére válik alkalmassá. Például egy bolygó légkörébe való belépéskor a raj kisimulhat egyetlen nagy aerodinamikai pajzzsá, majd leszállás után átalakíthatja magát egy kígyószerű alakzatba, amivel a nehéz terepen is könnyedén haladhatna. Ha talál valami érdekeset, akkor növeszthet magából egy antennát, adatokat sugározva a Földre. A csomópontok között megfelelő anyag alkalmazásával akár napvitorlaként is funkcionálhatnak a robotok.
Klikk a képre a nagyobb változathoz
Ha egy parányi meteor vagy egy rázós leszállás lyukat üt a rajban, a rendszer egy átrendezéssel képes lesz kijavítani önmagát, összefűzve a sértetlen csomópontokat. "Az űrhajók azért olyan drágák, mert egyetlen alkatrész meghibásodása megbéníthatja a teljes gépezetet, ezért alapos tesztelések és tartalék rendszerek szükségesek egy katasztrofális hiba esélyének csökkentéséhez. Ha testünk így működne, nem élnénk valami sokáig. Ehelyett, ha szervezetünk megsérül, új sejtek állnak a sérültek helyébe. Hasonló elven működnek robotjaink is, igyekeznek csökkenteni a sérülést és folytatni a küldetést" - magyarázta Curtis.
A tetraéder-alak szintén újnak mondható, azért esett rá a választás, mert rendkívül erős és stabil. "Ha a jelenlegi robot mobilegységek felborulnak egy távoli bolygón, az számukra halálos ítélettel egyenlő. Nincs rá mód, hogy odaküldjünk valakit, aki újra a kerekeire fordítja a szerkezetet. A TETWalkerek eleve átbillenéssel közlekednek, ami rendkívül megbízható módja a talpra állásnak" - mondta Curtis.
Időközben nagy erőkkel folyik a mesterséges intelligencia kutatása is, ami a robotok automatikus mozgását, navigációját és együttműködését vezérli. A kutatás keretében dolgoznak egy olyan újszerű interfész kifejlesztésén, ami integrálja a magas szintű döntéshozás képességét az alacsonyabb rendű tevékenységekkel, mint a járás és a rajzási viselkedés, az élő organizmusok ösztönös cselekményei. Az összes rendszert úgy tervezik, hogy képes legyen alkalmazkodni környezetéhez és abban fejlődni.
Letölthető videók:
Animáció a robotról mozgás közben, mérete 21 MB
Egy robotküldetés bemutatása, mérete 25 MB